Controladores SDN
O intuito dessa aula é apresentar alguns dos Controladores SDN existentes.
Serão apresentados alguns Controladores, demonstrando suas peculiaridades.
Após a análise teórica, iremos testar 2 controladores escritos em Python:
Antes de começarmos, baixem em suas máquinas os projetos do POX e do Ryu.
Esta apresentação tem como base o artigo “A comparison between several Software Defined Networking controllers” e a dissertação Estudo comparativo de controladores SDN: avaliando a utilização de recursos no hospedeiro.
Referêncial Teórico
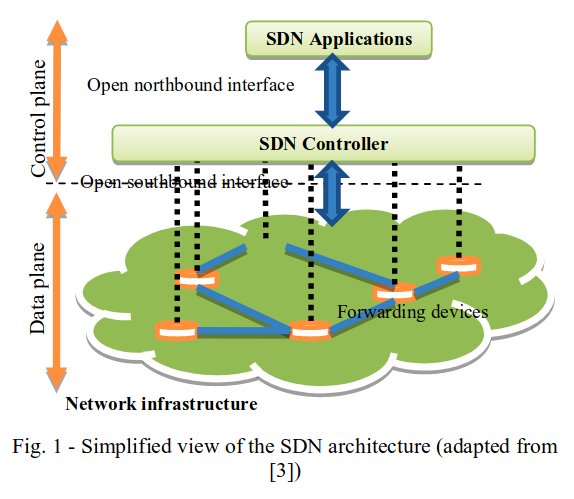
As Redes Definidas por Software se baseam em 4 pilares:
- A separação do Plano de Dados e Plano de Controle
- A utilização de fluxos ao invés de endereço de destino para decisão de encaminhamento
- O controle lógico se estabelece em uma entidade externa: o Controlador SDN
- A programação da rede por softwares
Controladores
The first SDN controller that supported OpenFlow was NOX written in C++
Alguns dos controladores mais utilizados do mercado são: Beacon, Floodlight, NOX, POX, Opendaylight e Ryu.
POX
- Código aberto
- Variação do antigo controlador NOX
- Escrito em Python
- Sua utilização permite um rápido desenvolvimento do plano de controle, principalmente por usar uma linguagem de alto nível para configuração, ou seja, é mais adequado para casos em que se deseja uma rápida prototipagem do que para usos empresariais
- Consegue operar em todos os tipos de máquinas e provê uma forma de migração das aplicações baseadas em NOX
- Enfoque primário na área de pesquisa
- Suporta diversos sistemas operacionais
- Suporta a versão 1.0 do OpenFlow
Ryu
- Código aberto
- Escrito em Python
- Possui suporte de um grupo de pesquisa denominado NTT Labs
- Com uma API bem definida, torna fácil o desenvolvimento de novas aplicações de gerenciamento e controle
- Cada aplicação Ryu tem uma pilha para receber os eventos, que são processados na ordem em que são recebidos
- Assim como o POX, não apresenta escalabilidade no uso da CPU
- Suporta as versões 1.0, 1.2, 1.3, 1.4 e 1.5 do OpenFlow
ONOS (Open Network Operating System)
- Código aberto
- Escrito em Java, logo necessita de um tempo maior para aprender a utilizar este controlador
- Pronto para ser utilizado em produção
- Boa performance
- Suporta as versões 1.0 e 1.3 do OpenFlow
OpenDaylight
- Código aberto
- Escrito em Java, logo necessita de um tempo maior para aprender a utilizar este controlador
- Bastante apoiado pela industria de redes
- Bom para ser utilizado em produção
- Boa performance e suporte
- Suporta as versões 1.0 e 1.3 do OpenFlow
Comparação
Artigo
Teste de Ping
| Controlador | RTT Min [ms] | RTT Max [ms] | RTT Med [ms] |
|---|---|---|---|
| POX | 0.29 | 103.23 | 20.76 |
| Ryu | 0.11 | 61.05 | 11.86 |
| ONOS | 0.14 | 177.92 | 21.71 |
| Odl | 0.17 | 156.24- | 22.65- |
Teste de banda
| Controlador | Banda (h1 -> h16) | Banda (h16 -> h1) |
|---|---|---|
| POX | 3.93 Gbps | 3.93 Gbps |
| Ryu | 8.39 Gbps | 8.40 Gbps |
| ONOS | 9.23 Gbps | 9.23 Gbps |
| Odl | 8.64 Gbps | 8.64 Gbps |
Dissertação
| Controlador | Openflow | Fluxos / s |
|---|---|---|
| POX | 1.0 | 6.675,51 |
| Ryu | 1.0 | 10.636,40 |
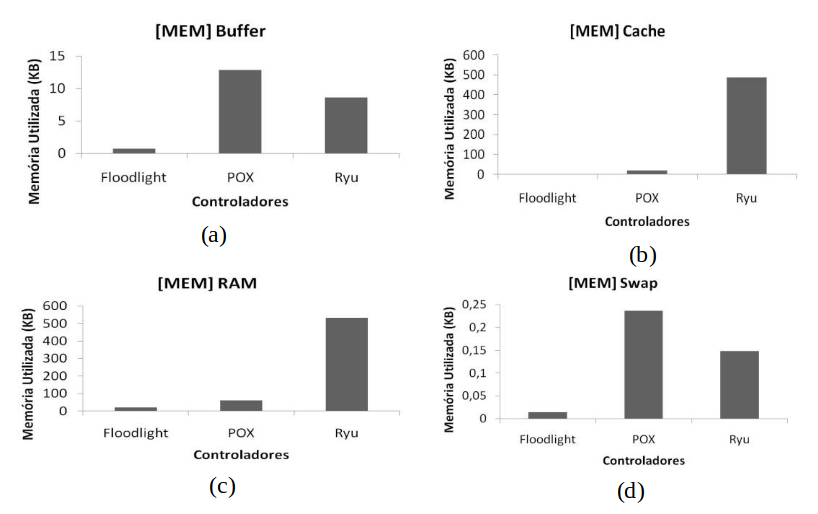
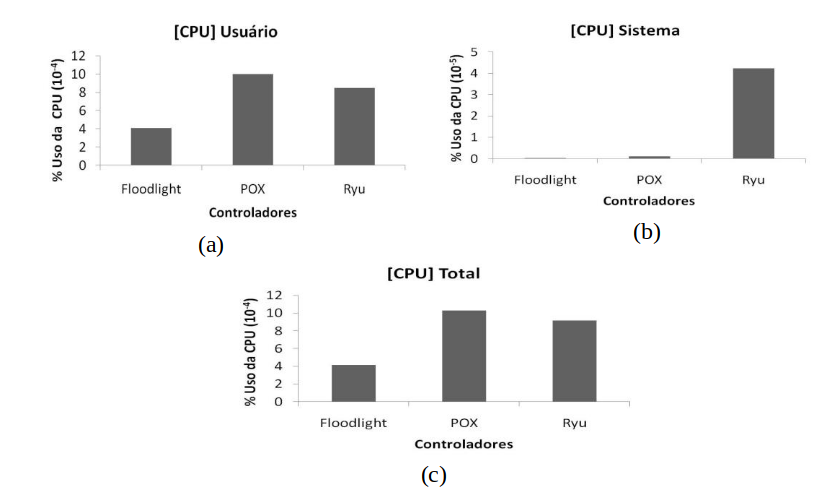
| Controlador | Memória | CPU |
|---|---|---|
| POX | Médio | Alto |
| Ryu | Alto | Alto |
Trabalho Prático
Tutorial POX 1, T POX 2 e Tutorial Ryu
Comandos importantes:
sudo mn -c
dpctl dump-flows
Primeiro Cenário:
- POX
- single, 3
- hub
Segundo Cenário:
- POX
- single, 3
- l2_learning
Terceiro Cenário:
- Ryu
- single, 3
- simple_switch
Quarto Cenário:
- Ryu
- linear, 4
- simple_switch